
So here is Sycophant 2. The first Sycophant was built on the cheapest R/C car body I could find in Radio Shack at the time.
The old 6V car was a bit underpowered for the head. The head was also mounted very high up, which made the hole thing a bit wobbly. The active IR sensors were touchy because they were operating at the edge of their range. Plus Sycophant "locked up" during art openings when more than one sensor was activated by multiple people packed in a room.
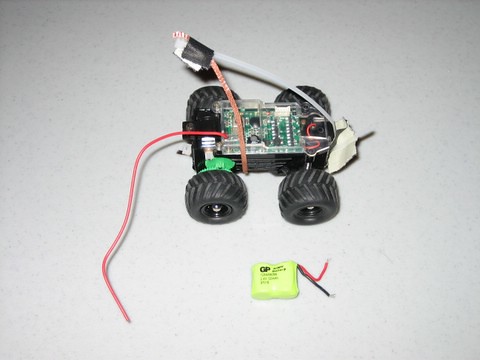
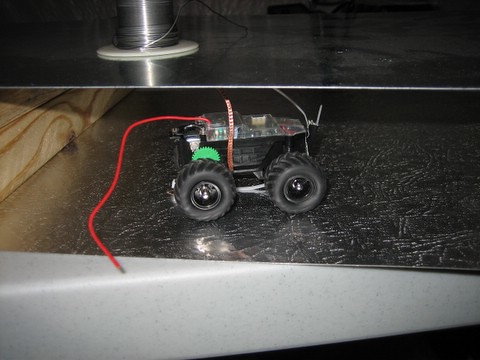
Sycophant 2 is built on a 9.6V powerful R/C car chassis that is very low to the ground. It uses Maxbotix ultrasonic sensors instead of Sharp active IR sensors. Also Sycophant 2 will move towards the closest person in case the room gets really full during openings. The PIC microchip programmed in assembly language of the first Sycophant has been replaced with a BASIC programmable RVHE board for faster programming.
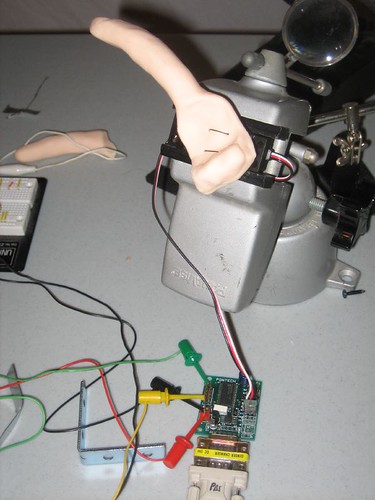
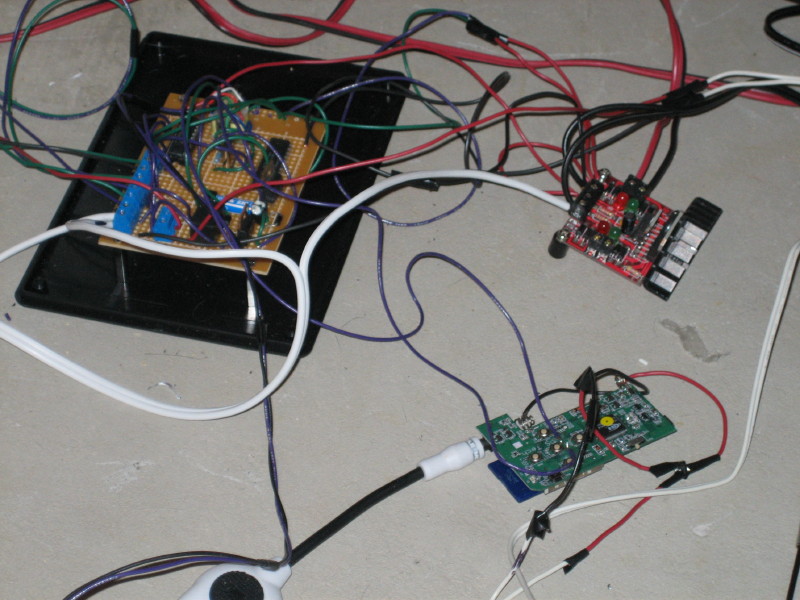
In the picture below, the RVHE board is under the head, you can see some wires going to it in the background. In the foreground, you can see how I made a mount for the ultrasonic sensor using FastSteel epoxy putty as a base with a screw encased inside it, then a piece of aluminum is attached with a nut and washers, and the sensor is attached to the aluminum with #2 screws and nuts:
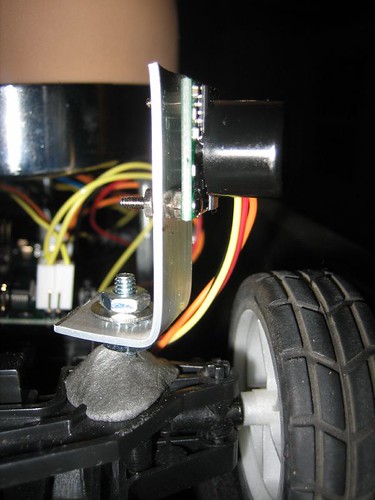
Epoxy putty is great! Besides FastSteel, I am also a fan of QuickWood epoxy instead of wood putty. Curing in under an hour is the way to go. You can build or stick on any steel-like or wood-like object you want with this stuff!
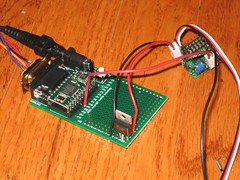
As with the first Sycophant, the second one still uses a 754410 H-bridge chip to drive the motor. I will probably throw a DIP heat sink on it, but so far it has not gotten very warm.

















![IMG_0902[1]](http://static.flickr.com/70/203896429_57879481fa.jpg)








{kind=link}