The sad truth is that I have received report that one side of "Breath" that I shipped across the continent for a test "smoked" when turned on after it was received, and no, I was not shooting for "smoke-over-IP".
I have a love-hate relationship with
Arduino. The system is really easy to get going and use, but its limitations in speed, flakey software serial port, and questionable thermal properties of its voltage regulator system always bug me. And for a project like "Breath," I have to add a bunch of other elements (Xport, Solid state relay, etc.)
Needless to say, I was a little despondent about the melt down, but then, in the midst of my preparations for hari kiri, it came to me: I bought a Making Things Make Controller 2.0 and Make Application Board 2.0 (purchased as the
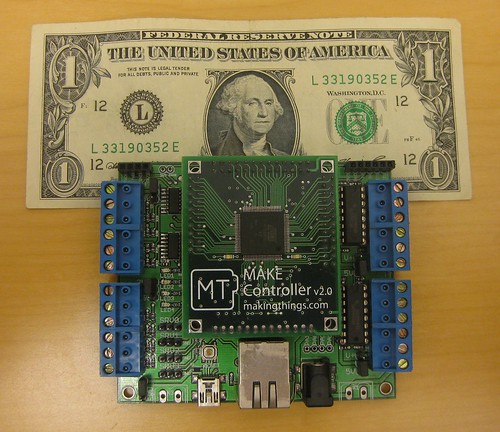
Make Controller Kit). This combo packs a good microcontroller with Ethernet and 1 Amp digital outputs, powered by 5-24V DC or USB, with four servo connectors and four on-board LEDs as well, and oh yeah a serial port.
My first day thoughts:
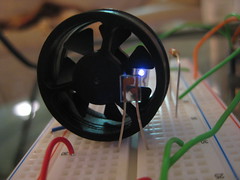
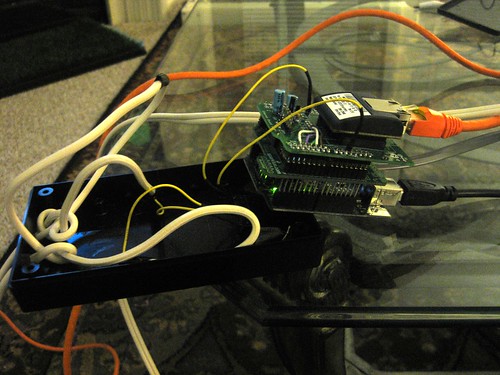
Hardware: a 10/10. Awesome stuff, all on one board, and the Ethernet appears to DHCP correctly (i.e. also grabs a gateway), and no problem with the hefty digi driver outputs driving a small 12V fan (with a 12V power supply). The size is a bit smaller than I had imagined, which is nice:
Documentation: 4/10. All the documents are there, but the organization is very confused. There are several tutorials, but you have to work through a bunch of them to get over the initial hump of understanding what is going on. Plus the two different versions of the board and the many different ways to build firmware are confusing.
So here are some things you should know:
0) Look at the
Make Application Board v2.0 documentation. This will help you from going crazy since most of the documentation refers to the older version of the board. Note that the 2.0 board does not have DIP switches or a potentiometer.
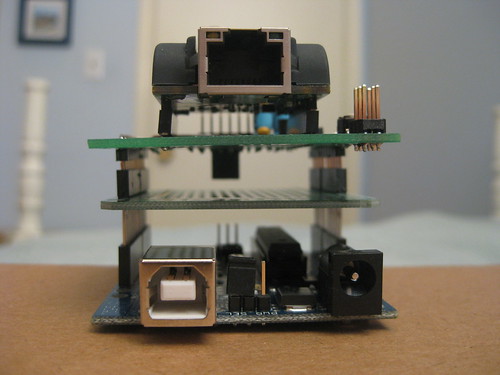
1) The Make Controller 2.0 is a board that fits into the Make Application Board (or a few other boards they sell as well).
2) Out-of-the-box, the Make Controller runs firmware called "Heavy" that can do USB & Ethernet I/O and accepts Open Sound Control (OSC) commands. By the way, download the most recent version of "Heavy" as you may want to put it back on the board later after your erase it. Make Controller
downloads are here.
3)
mchelper is the first program you want. It will show you any Make Boards hooked up via USB, or any Make Boards it can find on the LAN (note: if you are running both wired and wireless LANs on your laptop, you may need to turn the one which your board is not on to find it, it looks like mchelper only searches one LAN). Here is a screenshot:
4) Once you've played around with sending some OSC commands (like "/appled/0/state 1" which turns on one of the LEDs on the board), you can try to write and build your own firmware with mcbuilder. There isn't too much documentation on it, but you can think of it like the Arduino software you run on your PC to write programs and then upload them to the Arduino. I don't think you need those other "toolchains" if you aren't doing anything too bizarre. But to upload your ".bin" built files to the board, you need to first erase the board.
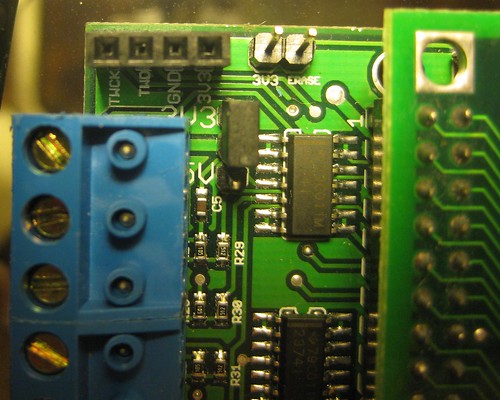
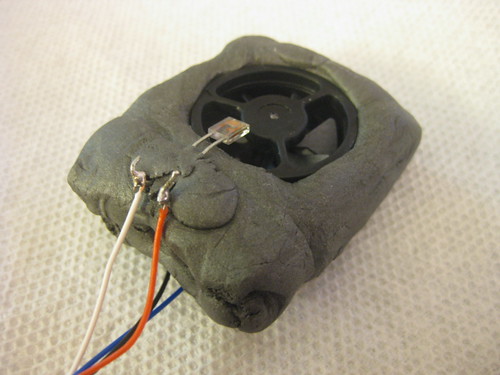
5) I can't get the erase to work with USB or Ethernet from mchelper on OS X! So after looking around, I found out there was an "erase" function on the board: you short 3.3V to "erase" on the upper left of the board, then power cycle. I went ahead and soldered in two header pins and I can short them easily that way, or hook up a pushbutton if I need to erase it often during development. See the upper middle of this photo:
6) Once you have erased the board, you can upload your ".bin" program from either mchelper or mcbuilder.
7) mcbuilder has a small number of "examples" to get you going, much like the Arduino IDE software. For example, there is a web server example that allows you to light up the LEDs on the board through a web form.
So I'm pretty happy: with "Heavy" installed right now, the board DHCPing an IP address from my wired/wireless LAN router, I can send OSC commands using mchelper over wireless through my router to the wired connection to the board, and can drive a small 12V fan with the digital outputs using the "motor" OSC commands. I think there is hope for "breath" to be ported to the Make Controller, but now I need to learn a bit more about writing software for it.