I fired up my old Pontech SV203 servo controller. It takes serial (RS-232) input to control a bunch of servos, and also has five A/D converters on board as well. After going through pain trying to get my VB6 compiler working with the PC serial port on my Win98 art box, I decided to bite the bullet and load up Python (to some extent because my wife is learning Python right now). Adding on the Python Win32 Extensions and then the PySerial module, I finally was able to talk from Python to the SV203 servo controller.
I found a great deal on a Wiznet serial to Ethernet gateway, but then came the surprise that the SV203 isn't made any more, and I need to have one on each side of the network connection for the haptic interface to go across the Internet.
So that leaves me looking at Ethernet-enabled microcontroller boards. If I continue in the PIC direction, there is a board from Modtronix with Ethernet, RS232, many digi I/Os, and 5 A/Ds. To program this board, I'd have to learn PIC C. I know C, but using it to control a PIC is a bit of a learning curve.
On the other hand, there is also the RVHE board, which is programmed in a simple BASIC. Besides Ethernet, it has 6 A/Ds, 26 digi I/Os, and two PWM I/Os (though I'd still need to program my own using the digital I/Os if I wanted to control 5 servos). It costs more, but I am sure the development time would be much less. Supposedly it can do 500,000 BASIC instructions per second and is interrupt driven, so I should be able to control 5 servos in addition to everything else. I've never heard of this board before, it must be pretty new. It is more expensive than the PIC Ethernet boards, but probably worth it.
Monday, February 20, 2006
Wednesday, February 15, 2006
Haptic Chicken
I had a breakthrough concept for my haptic interface project yesterday! It is going to have to wait a while to be revealed, but I can assure you it doesn't have anything to do with remote chicken fondling.
Tuesday, February 14, 2006
Ethernet-enabled PIC boards
For a project I am working on involving haptic interfaces at a distance, I am looking at cheap Ethernet-enabled microcontroller boards. Modtronix has several between $55 and $70.
There also is the Packet Whacker which can provide an Ethernet interface for PIC and AVR, assembled for $35 or $25 for a kit if you like surface mount soldering. They also have the "Easy Ethernet W" board with a PIC for $60-$80 depending on PIC model and kit/assembled.
There also is the Packet Whacker which can provide an Ethernet interface for PIC and AVR, assembled for $35 or $25 for a kit if you like surface mount soldering. They also have the "Easy Ethernet W" board with a PIC for $60-$80 depending on PIC model and kit/assembled.
Good sensors from Parallax
Parallax makes a lot of interesting devices to interface to their Basic STAMP. Some of them are way overpriced, but here are some winners:
Piezo Film touch switch / motion sensor $1.49
Hall Effect sensor $4.25
PING Ultrasonic distance sensor $24.95. Three pins, VDD, GND, and and I/O pin for input to start the ultrasound pulse, and then output when it hears the echo.
PIR Sensor $7.95. Three pins (VDD,GND, and output), plus it is small (1" on a side).
Piezo Film touch switch / motion sensor $1.49
Hall Effect sensor $4.25
PING Ultrasonic distance sensor $24.95. Three pins, VDD, GND, and and I/O pin for input to start the ultrasound pulse, and then output when it hears the echo.
PIR Sensor $7.95. Three pins (VDD,GND, and output), plus it is small (1" on a side).
Slime Mold Robots
Robot controlled by a slime mold news article, and the paper is here.
My mother, a biologist studying mycology, kept slime molds around the house when I was a child. I joke that they were my only childhood pet!
My mother, a biologist studying mycology, kept slime molds around the house when I was a child. I joke that they were my only childhood pet!
Tuesday, February 07, 2006
Interface in Japanese magazine
Am I officially "Big in Japan"? Here is a piece on the Interface show in the Japanese magazine Shift.
Power Pick-Ups
My initial tests show that a "bumper car" style overhead power pick-up may be difficult to reliably deploy for a micro-RC car. There are lots of "dead spots" where the car stops picking up power. I realize though that the optimal pick-ups should be made of stainless steel wire, which should be available for lure tying at Gander
I found a manual for a real overhead pick-up bumper car. They have a quite sophisticated floor pick-up involving a steel brush wheel.
In addition to the overhead power pick-up, there are bumper cars with floor pick-up power system (look at bottom floor picture). Evidently there are stripes of power and ground metal lines on the floor, and there must be some kind of array of electrodes picking up the power and diode-steering it to the engine. Alternatively, the use of AC power could simplify the situation.
Another option is inductive power transfer (IPT), but I'm concerned that it may interfere with the RC radio commands and/or the RF video coming from the car camera.
I found a manual for a real overhead pick-up bumper car. They have a quite sophisticated floor pick-up involving a steel brush wheel.
In addition to the overhead power pick-up, there are bumper cars with floor pick-up power system (look at bottom floor picture). Evidently there are stripes of power and ground metal lines on the floor, and there must be some kind of array of electrodes picking up the power and diode-steering it to the engine. Alternatively, the use of AC power could simplify the situation.
Another option is inductive power transfer (IPT), but I'm concerned that it may interfere with the RC radio commands and/or the RF video coming from the car camera.
Wednesday, February 01, 2006
"Drive" proof of concept
The next project I will be working on is tenatively called "Drive". It will involve a mini-RC car driving around a three-dimensional, multi-level environment. The car will have a small video camera on it, and the viewer will only see the video from the car. I am hoping to even hook it up to the Internet so that people can drive the car over the web.
The first question is how to distribute power to the car. I went ahead and removed the battery from a Radio Shack ZipZap. I added solder wick braid power pickups, and placed the car between two pieces of sheet metal. The bottom one is textured to provide more traction for the car. I found that the pickups needed more "springyness" to make contact with the metal, so I added wireties to push the solder wick braid into the sheet metal.
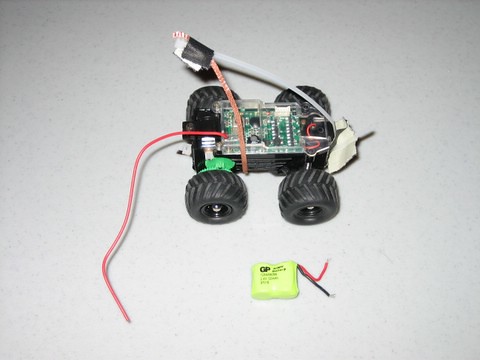
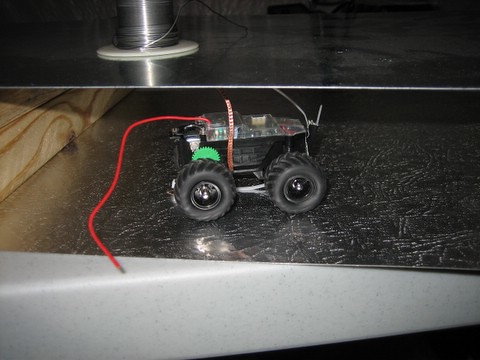
I got the car to move a bit, but clearly it hits lots of "dead spots". I think that the combination of upping the distribution voltage from 2.5V to 12V as well as adding a big capacitor on the car may solve the problem. The distribution voltage has to go up because the camera needs 9V.
Power distribution is of course only one challenge. The 3" distance between the pieces of metal is much smaller than the wavelength of either the 49 MHz control signal for the car, or the 2.4 GHz frequency of the video camera transmitter. I'm hoping that close proximity will avoid the RF attenuation issues, but we'll see.
The first question is how to distribute power to the car. I went ahead and removed the battery from a Radio Shack ZipZap. I added solder wick braid power pickups, and placed the car between two pieces of sheet metal. The bottom one is textured to provide more traction for the car. I found that the pickups needed more "springyness" to make contact with the metal, so I added wireties to push the solder wick braid into the sheet metal.
I got the car to move a bit, but clearly it hits lots of "dead spots". I think that the combination of upping the distribution voltage from 2.5V to 12V as well as adding a big capacitor on the car may solve the problem. The distribution voltage has to go up because the camera needs 9V.
Power distribution is of course only one challenge. The 3" distance between the pieces of metal is much smaller than the wavelength of either the 49 MHz control signal for the car, or the 2.4 GHz frequency of the video camera transmitter. I'm hoping that close proximity will avoid the RF attenuation issues, but we'll see.
Subscribe to:
Posts (Atom)